
An open-source Quasi Direct Drive Actuator for use in locomotion centric projects.
Note: The project is ongoing, the blog post will be updated as the project progresses.
Hardware
- 400kv BLDC
- GEABN0.5-20-8-K-6
- SI0.5-100
- HK0408
- SSG0.5-40B
- SB6700ZZ
Design
Early Sketches
3D Designs
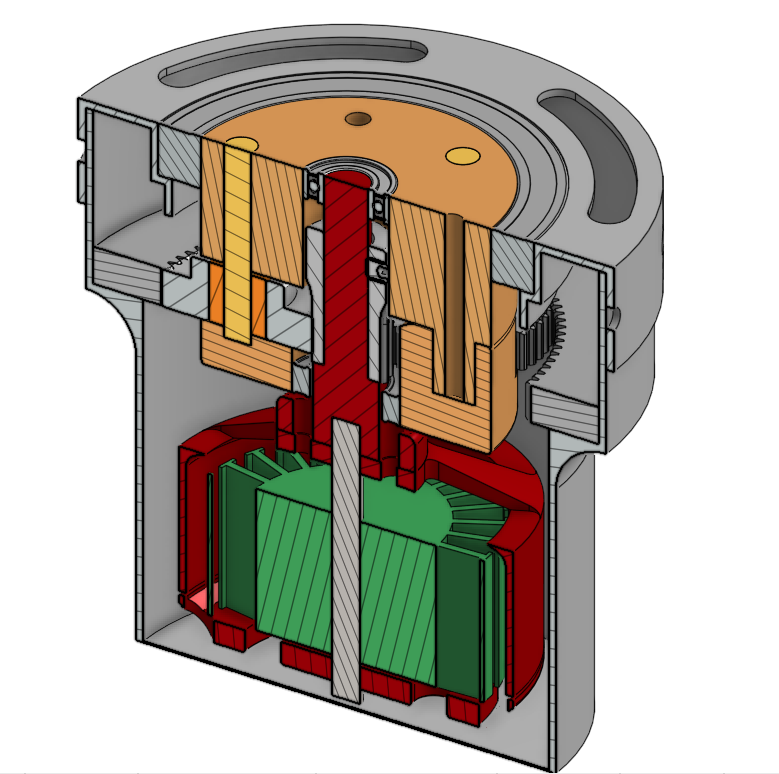
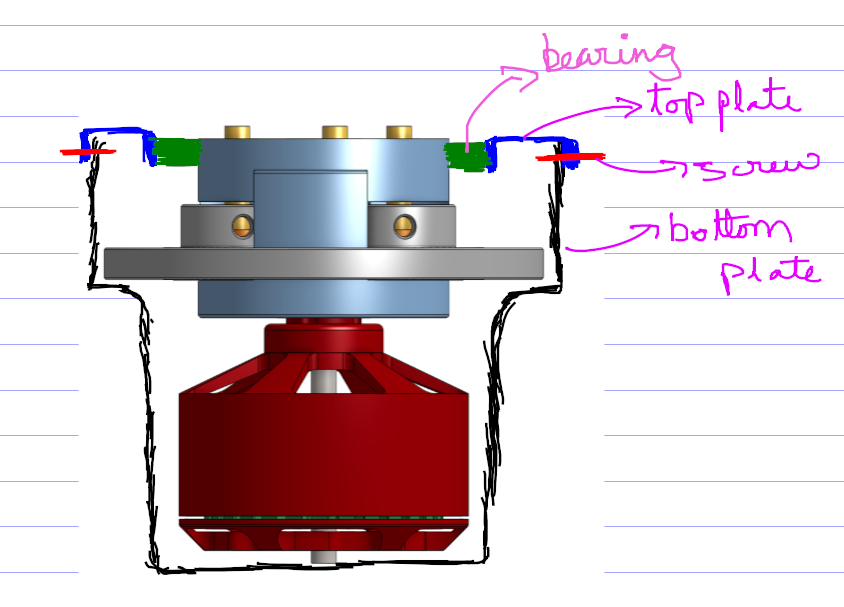
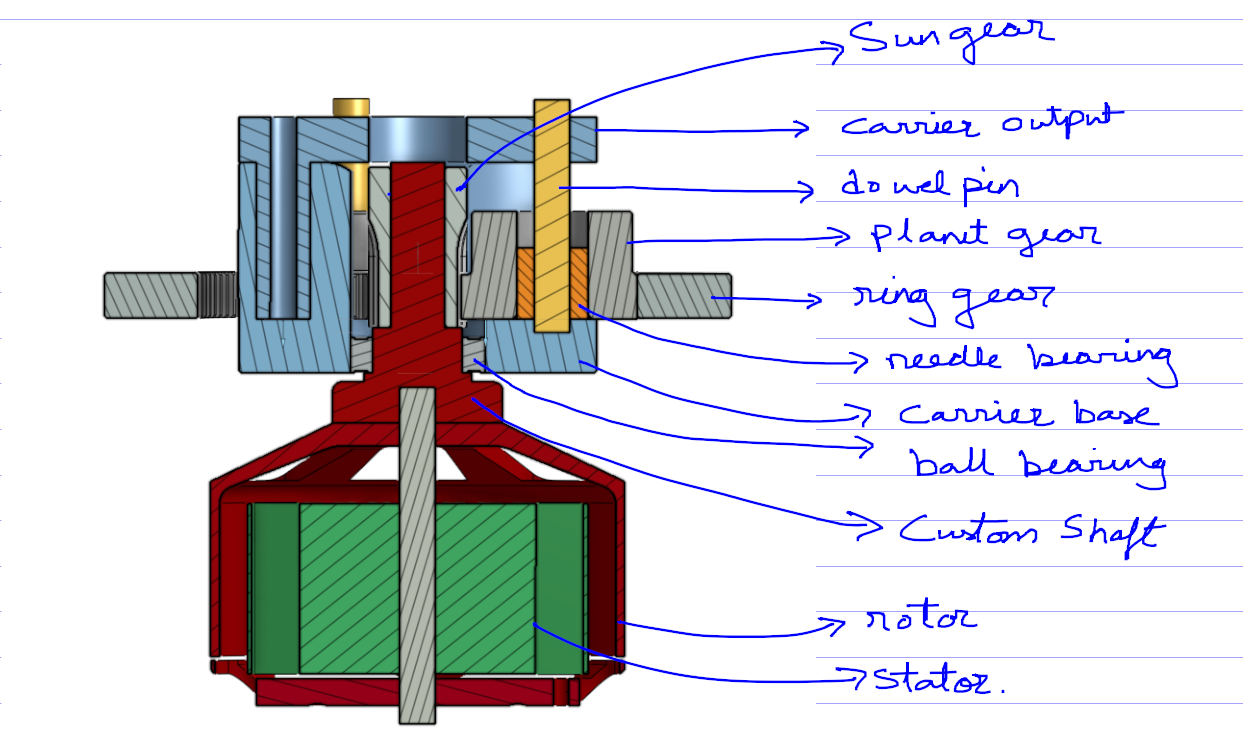 In Figure: Cross-section view of the actuator
In Figure: Cross-section view of the actuator
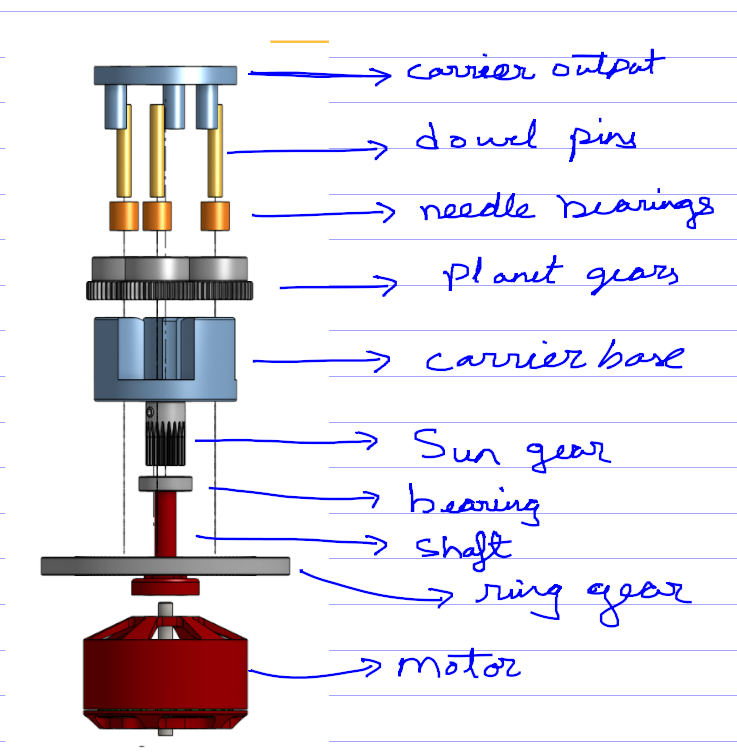 In Figure: Exploded view of the actuator
In Figure: Exploded view of the actuator
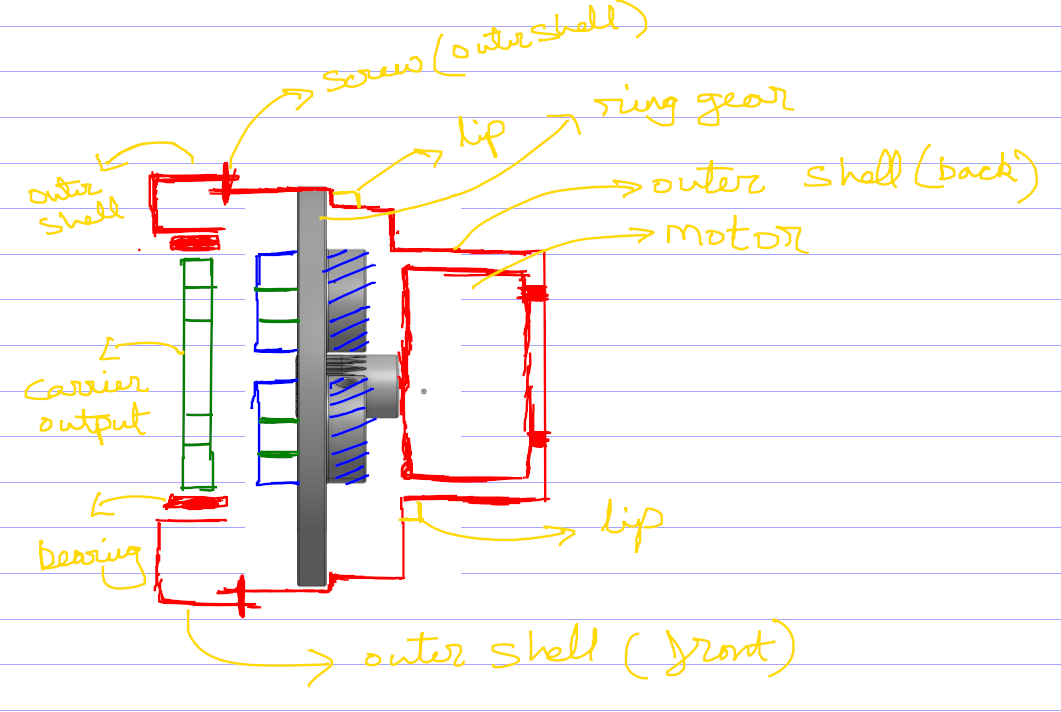
 In Figure: Sketch of the outer casing for the actuator
In Figure: Sketch of the outer casing for the actuator
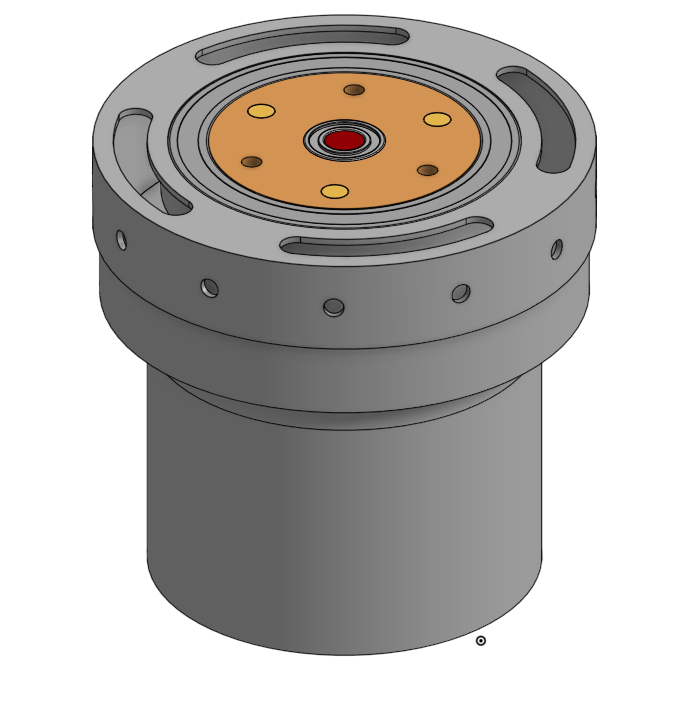 In Figure: Final actuator design
In Figure: Final actuator design
Motion Study
Demo
Implementation
Future Work
[ ] Programming and Control