
A project to explore the use cases and challenges of using a spherical robot for omnidirectional traversal.
Note: This is an old project and has been recently documented, most of the project media (photos, videos) are lost, I’ll try updating this blog with photos and videos as I find them.
Hardware
- Arduino UNO
- L298N
- 100RPM 12V DC Geared Motor
- 2500 mAh Lipo Battery
- CT6B
- 2 peice Hamster Wheel
Design
CAD
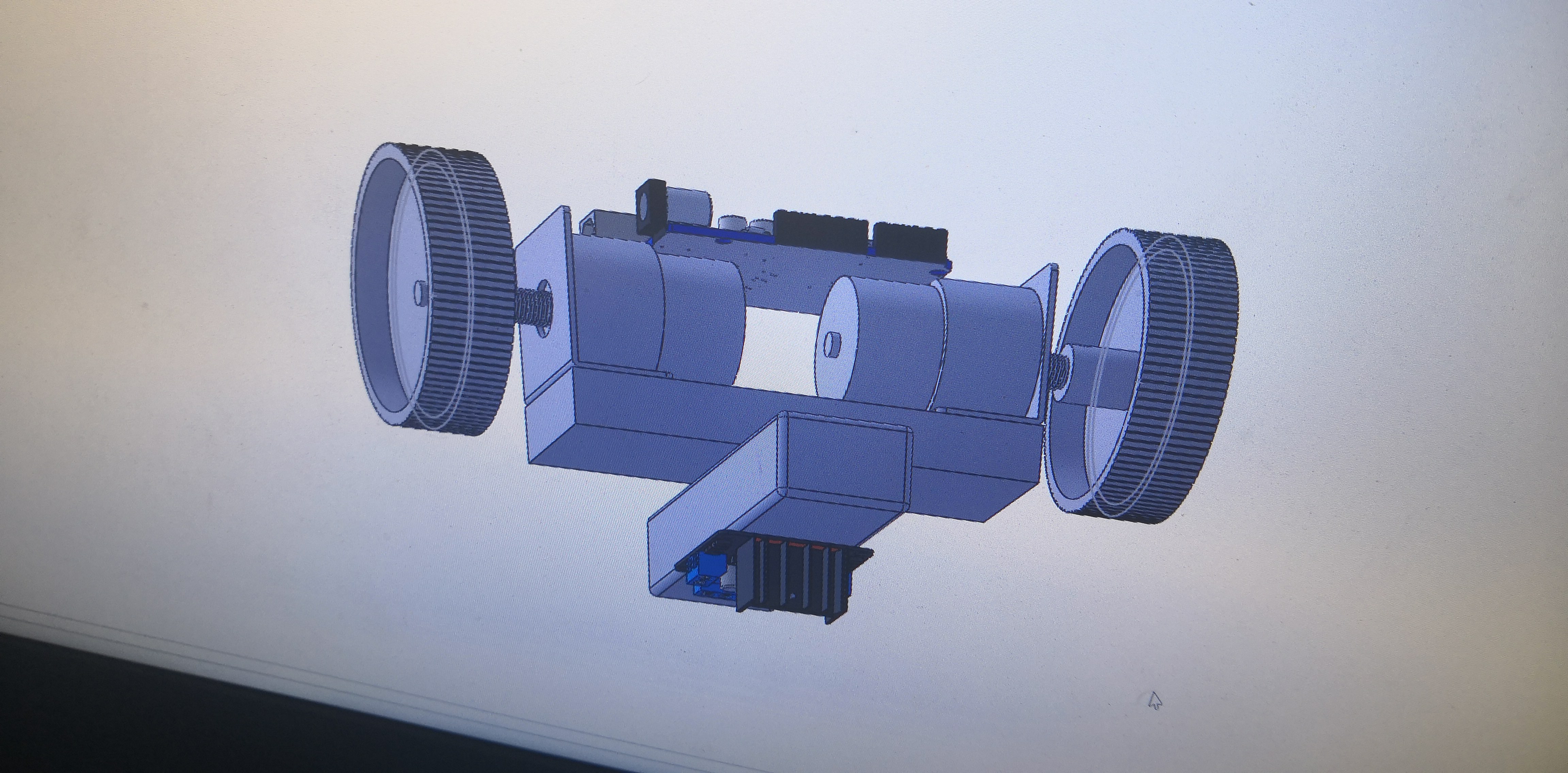
Final Model
