
This project explores the use of Action Chunking Transformers and related architectures for learning via demonstration for solving loco-manipulation tasks, in paticular interacting with a varity of...
Getting Started with SO100 for Reinforcement Learning

Over the past few years, I’ve had the opportunity to tinker with various robots—quadrupeds, bipeds, wheeled robots, and more. This hands-on experience has helped me apply and refine my skills in re...
Locomotion with Weighted Belief in Exteroception
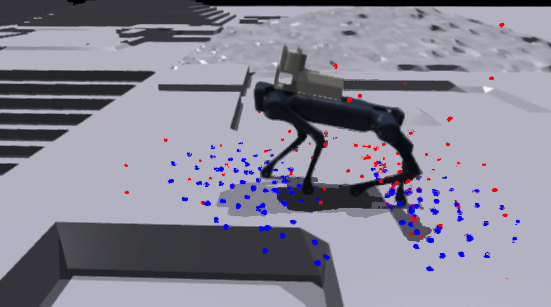
This project goes over the integration of elevation maps (typically obtained from LIDARs/Depth Cameras) into the locomotion pipeline and the intricacies involved in this process. We will try to r...
Neural Style Transfer for Locomotion
How do you ensure that a reinforcement learning (RL)-based locomotion policy produces a natural and efficient gait? This project is particularly close to my heart because it helped me answer this q...
Policy Modulated Trajectory Generation for Quadrupeds
This blog post explores the idea of using a set of trajectory generation equations in conjunction with a neural network for quadruped locomotion. We will discuss the advantages of this approach a...
Proprioceptive Locomotion in Unstructured Environments

The following post goes over and outlines a few methods for training a blind locomotion policy for a quadruped robot, most of the work shown here has been done during my time at the CNRS-AIST JRL...
Deep Reinforcement Learning - Part 4 - Monte Carlo, Temporal Difference & Bootstrapping Methods
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Deep Reinforcement Learning - Part 3 - Dynamic Programming
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Deep Reinforcement Learning - Part 0 - Getting Started
Getting into deep reinforcement learning is a tough but rewarding journey. The primary reason it is so difficult for beginners is due to the shear number of fields involved. Deep Reinforcement Lear...
Energy Minimization based Deep Reinforcement Learning Policies for Quadrupeds

The following work has been done during my time at the CNRS-AIST JRL (Joint Robotics Laboratory), IRL, Japan for my undergraduate thesis under the supervision of Dr. Mitsuharu Morisawa with support...