
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Deep Reinforcement Learning - Part 1 - Multi-Arm Bandits
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Autonomus Ground Vehicle
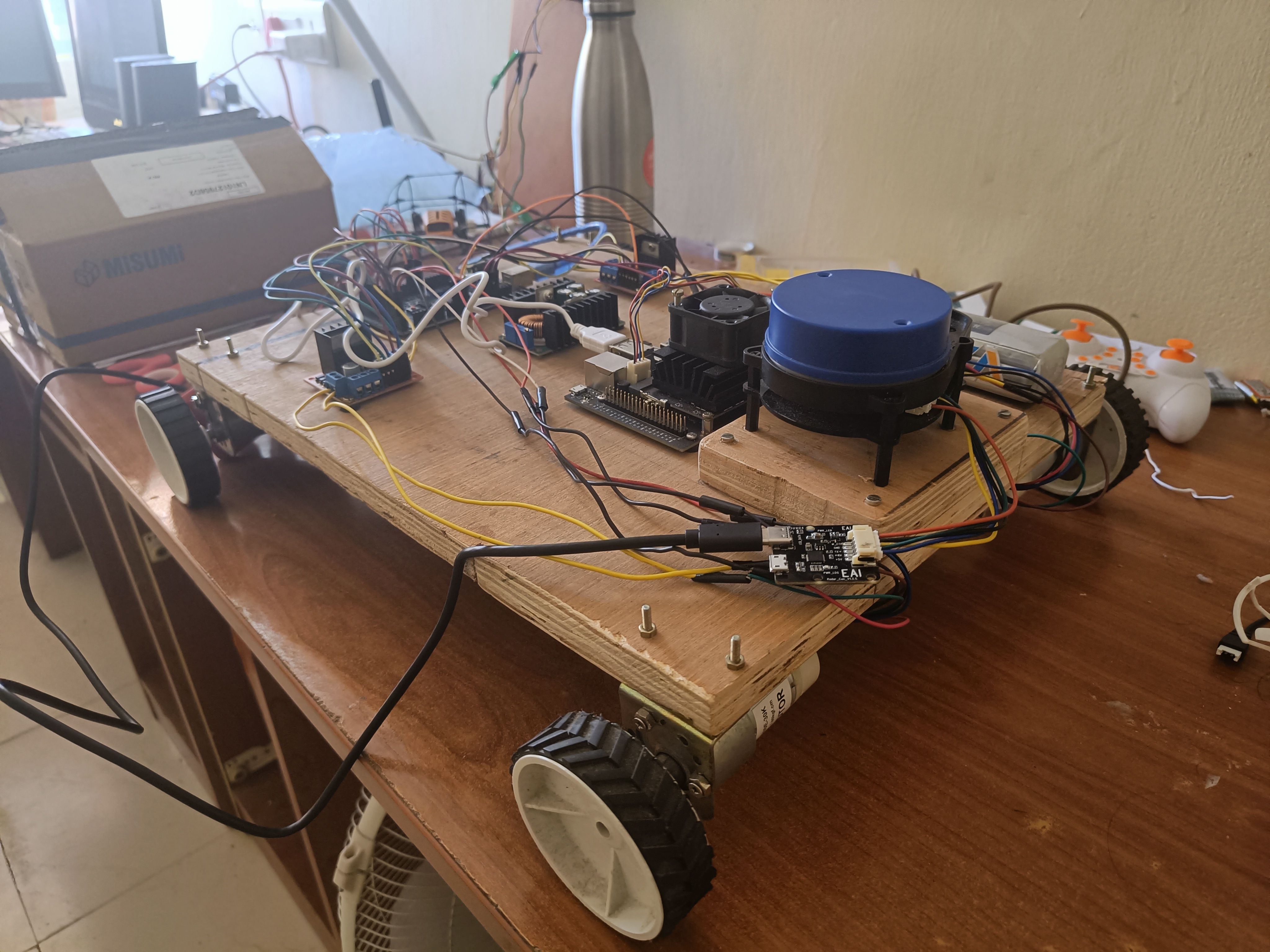
An Autonomous Ground Vechile for exploring concepts like localization, path planning, control in ROS. Hardware NVIDIA Jetson Nano Arduino Mega Buck Converter RPLIDAR A8 L298N Motor Dr...
URDF
The URDF file format is a way to represent robots and their components in ROS. It uses a modified verion of the XML syntax. Structure of URDF geometry types box <box size="0.6 0.1 0.2"/...
Lite Bar

Introduction A multipurpose indivudially addressable LED Strip based tubelight, that can be used to visualize music, time, smartphone notifications. Hardware ESP32 1 Meter WS2812B Strip (...
POV - Lightsaber

A persistance of vision lightsaber heavly inspired by bitluni(original build). Introduction A LED Lightsaber equipped with an onboard IMU and ESP32 to detect the current angle of the lightsaber ...
Aerial Navigation in GPS Denied Environments
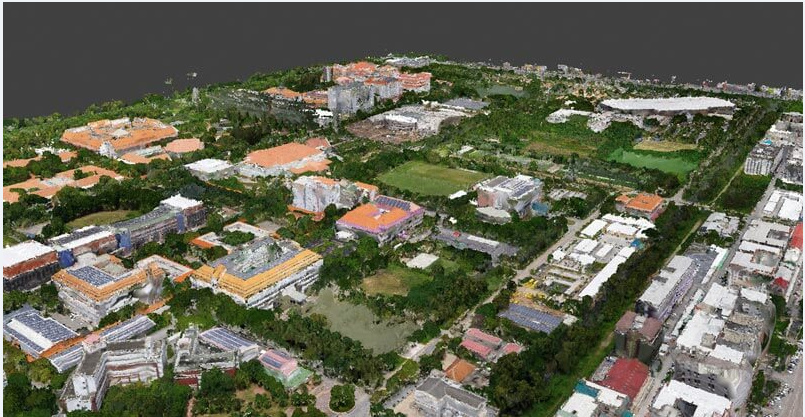
A project on achieving realtime-orthomosaic SLAM for aerial navigation using a single downwards facing camera in outdoor GPS denied environments. Results Introduction T...
Co-Axial Bi-Copter
A project to explore control strategies for thrust vector control of an co-axial propeller with four control surfaces. Note: The project is in progress, further details/sections will be added as...
Quasi Direct Drive Actuator

An open-source Quasi Direct Drive Actuator for use in locomotion centric projects. Note: The project is ongoing, the blog post will be updated as the project progresses. Hardware 400kv BLDC ...
Plug-and-Play Oxygen Auto-flow Regulator for Low Flow Oxygen Therapy
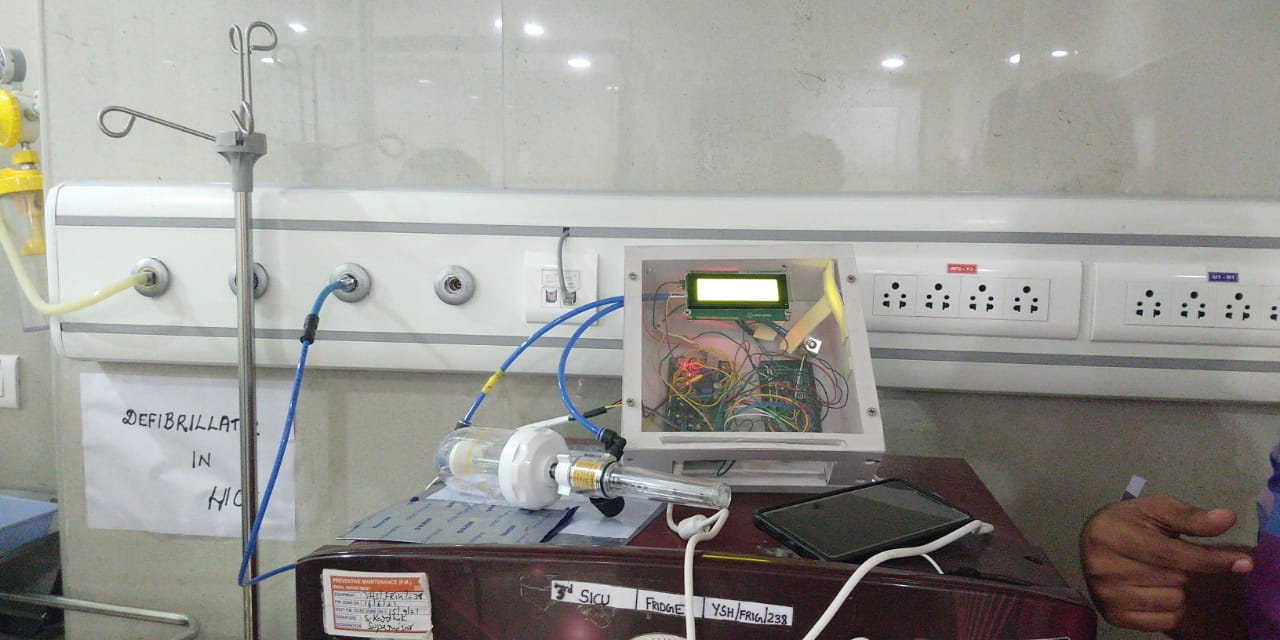
A portable, easy to interface device that intelligently controls the oxygen flow rate based on oxygen saturation and other vitals. This work has been published, please find the full details in ...