

Introduction I always had a thing for wearable electronics, a few months ago I got a cheap TFT display to play around with and the ultimate goal was to get familiar with all the electronics so that...
Introduction I always had a thing for wearable electronics, a few months ago I got a cheap TFT display to play around with and the ultimate goal was to get familiar with all the electronics so that...
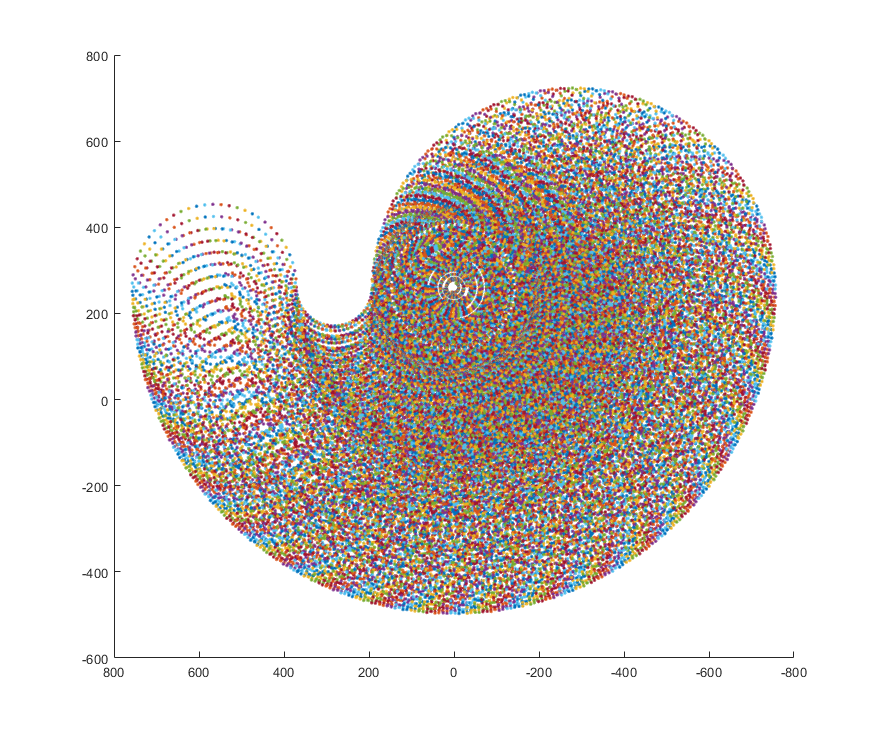
Introduction I wrote this small script to tinker with DH Parameters and wanted to visualize and understand how joint limits affect the manipulator workspace. While there are many ways of generating...
Contents: Visulization of TF, Publishing, Broadcasting & Listening to TF, Static Transform, Joint and Robot State Publishers. A transform specifies how data expressed in a frame can be trans...
Packages ROS uses packages to orgnaize its program, you can think of a package as all the files that a specific ROS program needs to run sucessfully. A few common items inside a package: launc...
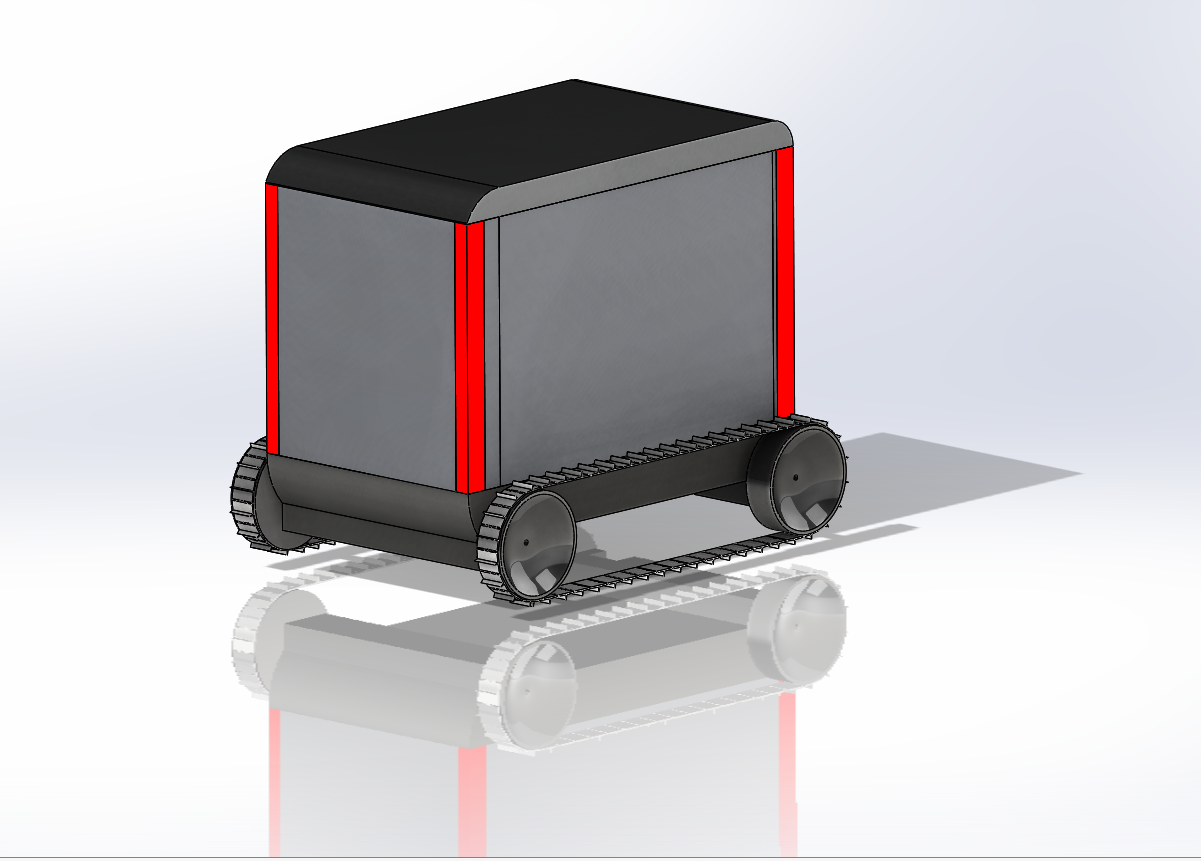
The aim of this project is to “Design, Develop and Implement an Autonomous Stair Climbing Robot which can climb stairs, turn at the quarter-landings and deliver packages autonomously”. Team ...
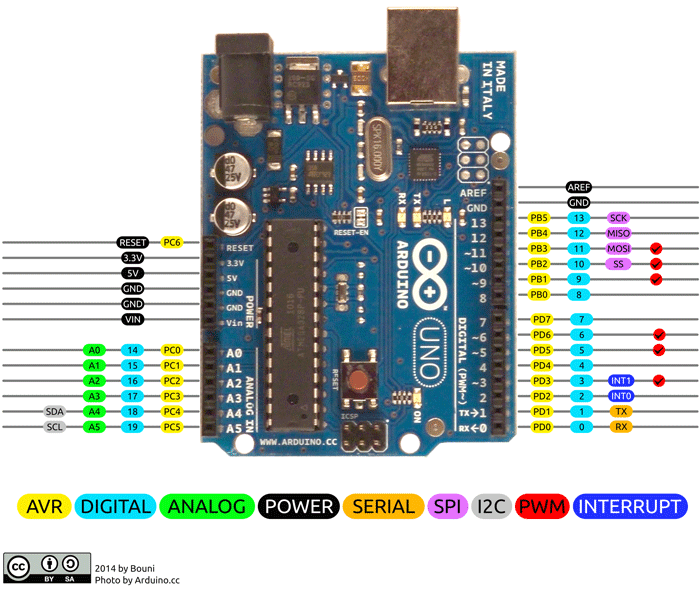
Most processors have interrupts. Interrupts let you respond to “external/internal” events while doing something else. This article uses concepts that have been covered in the previous post “AVR Di...
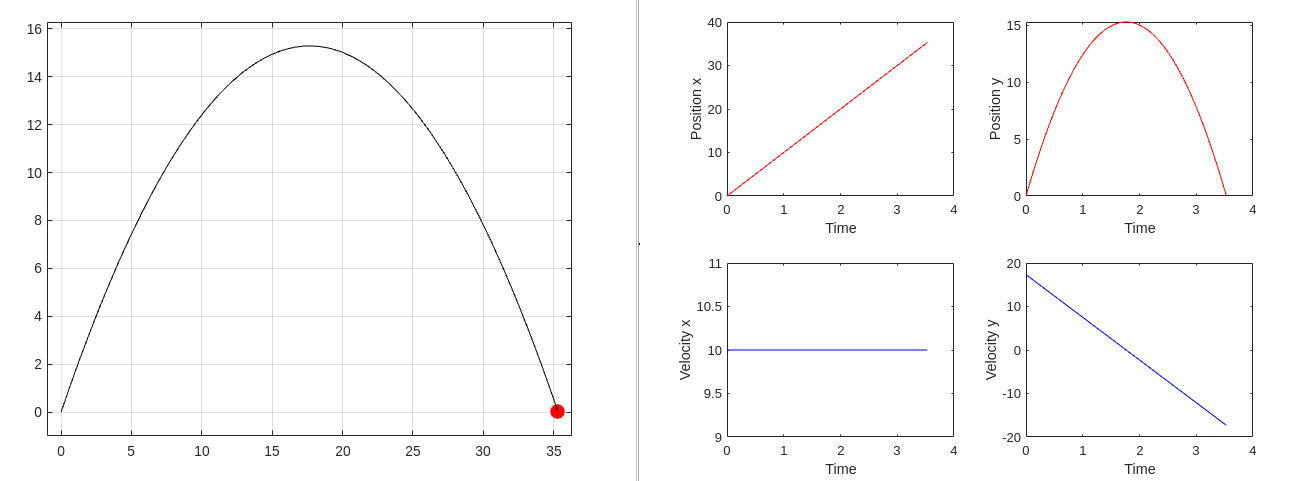
Introduction Coordinate Transformation in 2D The motion of manipulators and robots is often very complex and mathematically demanding. A single coordinate frame usually isn’t sufficient, and its o...
The ATmega328p has two 8 bit timers and one 16 bit timer. Each timer has multiple modes of working. We will be covering all the timers together in the tutorial, one mode at a time. Timers & Pr...
Port Manipulation refers to the technique of directly working with the underlying registers of the ATmega chip(in this context) instead of relying on predefined Arduino functions. This is primarily...

The primary objective of this project was to build an underwater rover platform that can be used to experiment with topics ranging from control systems and computer vision to embedded systems and...