
Bi-Manual Loco-Manipulation in Quadrupeds for Opening Doors
This project explores the use of Action Chunking Transformers and related architectures for learning via demonstration for solving loco-manipulation tasks, in paticular interacting with a varity of...
Getting Started with SO100 for Reinforcement Learning

Over the past few years, I’ve had the opportunity to tinker with various robots—quadrupeds, bipeds, wheeled robots, and more. This hands-on experience has helped me apply and refine my skills in re...
Locomotion with Weighted Belief in Exteroception
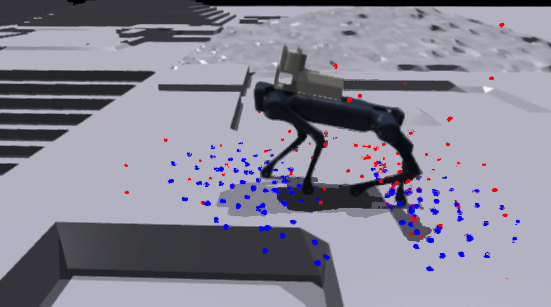
This project goes over the integration of elevation maps (typically obtained from LIDARs/Depth Cameras) into the locomotion pipeline and the intricacies involved in this process. We will try to r...
Neural Style Transfer for Locomotion
How do you ensure that a reinforcement learning (RL)-based locomotion policy produces a natural and efficient gait? This project is particularly close to my heart because it helped me answer this q...
Policy Modulated Trajectory Generation for Quadrupeds
This blog post explores the idea of using a set of trajectory generation equations in conjunction with a neural network for quadruped locomotion. We will discuss the advantages of this approach a...
Proprioceptive Locomotion in Unstructured Environments

The following post goes over and outlines a few methods for training a blind locomotion policy for a quadruped robot, most of the work shown here has been done during my time at the CNRS-AIST JRL...
Energy Minimization based Deep Reinforcement Learning Policies for Quadrupeds

The following work has been done during my time at the CNRS-AIST JRL (Joint Robotics Laboratory), IRL, Japan for my undergraduate thesis under the supervision of Dr. Mitsuharu Morisawa with support...
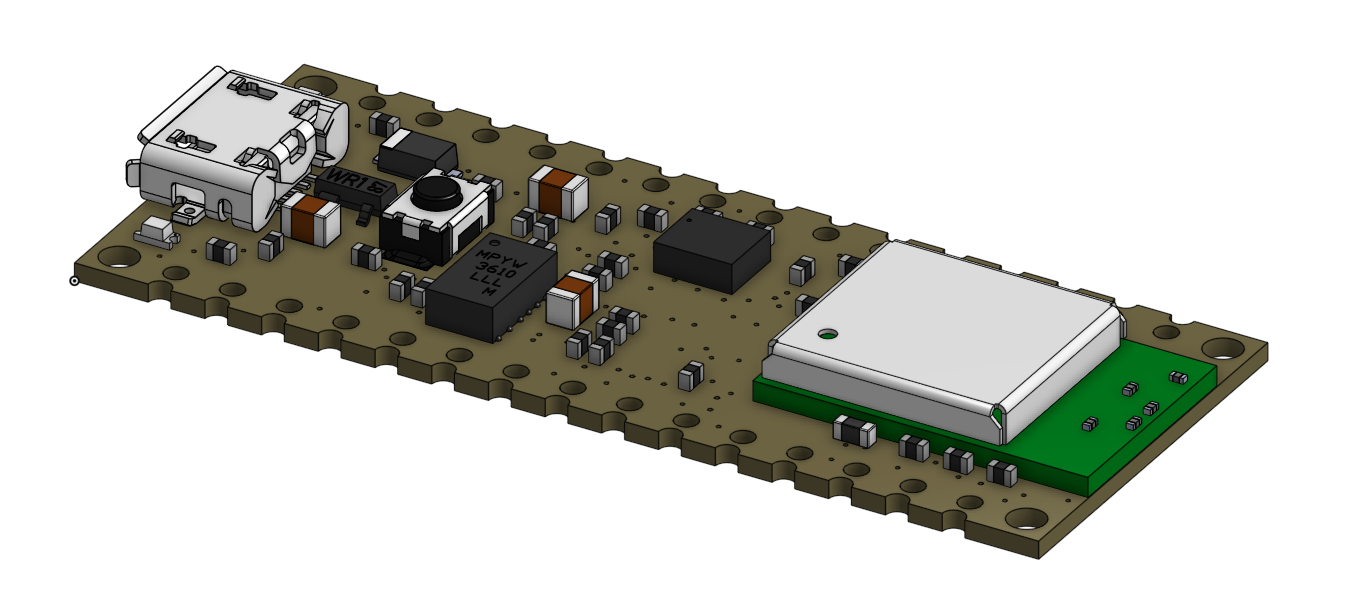
Autonomus Ground Vehicle
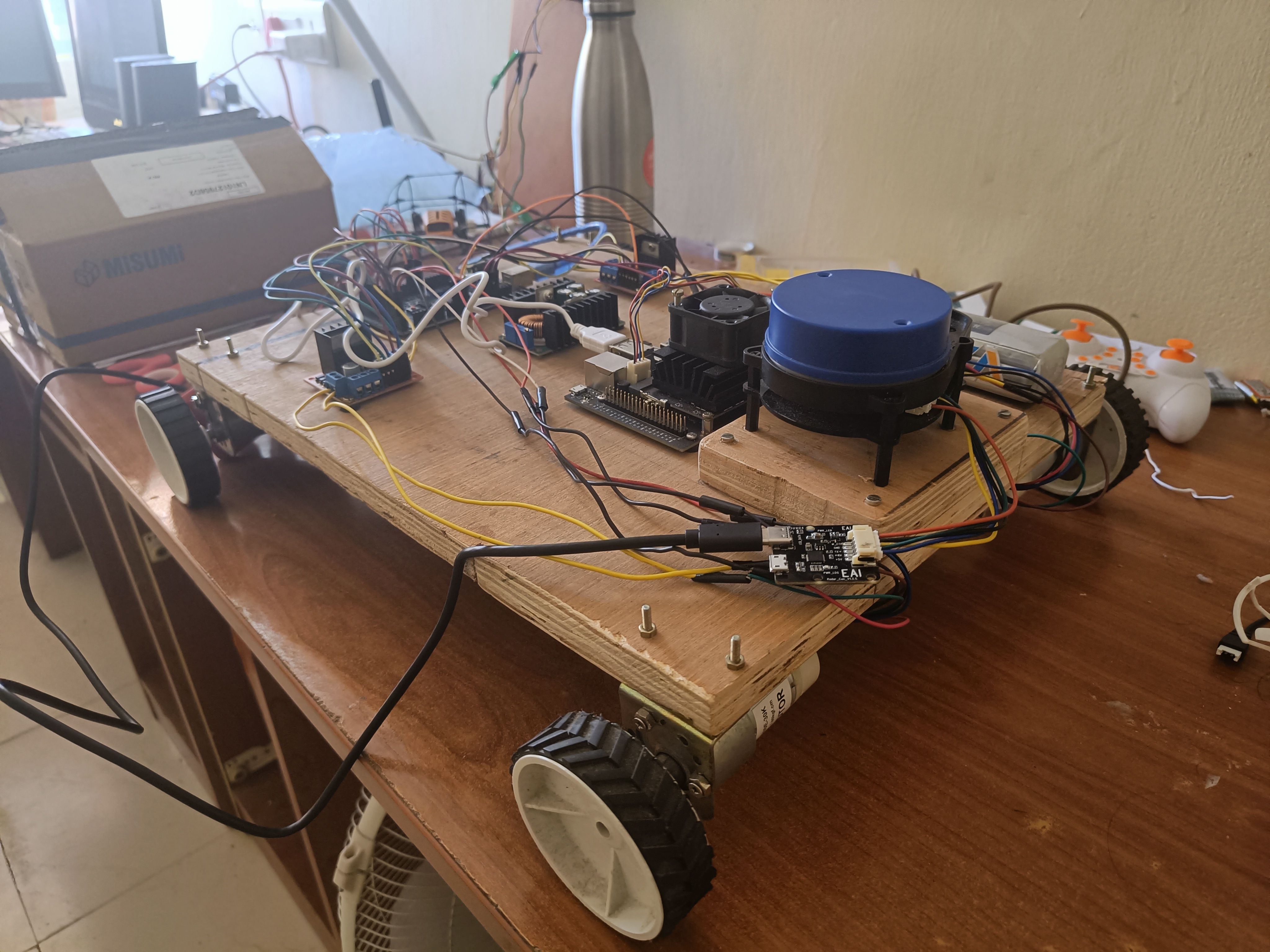
An Autonomous Ground Vechile for exploring concepts like localization, path planning, control in ROS. Hardware NVIDIA Jetson Nano Arduino Mega Buck Converter RPLIDAR A8 L298N Motor Dr...
Lite Bar

Introduction A multipurpose indivudially addressable LED Strip based tubelight, that can be used to visualize music, time, smartphone notifications. Hardware ESP32 1 Meter WS2812B Strip (...
POV - Lightsaber

A persistance of vision lightsaber heavly inspired by bitluni(original build). Introduction A LED Lightsaber equipped with an onboard IMU and ESP32 to detect the current angle of the lightsaber ...
Aerial Navigation in GPS Denied Environments
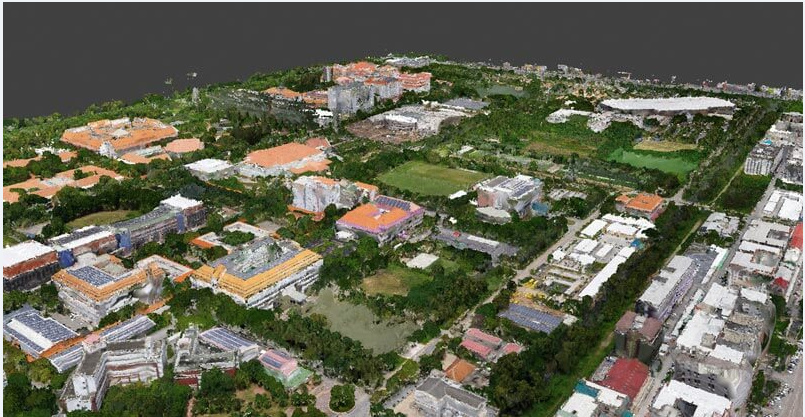
A project on achieving realtime-orthomosaic SLAM for aerial navigation using a single downwards facing camera in outdoor GPS denied environments. Results Introduction T...
Co-Axial Bi-Copter
A project to explore control strategies for thrust vector control of an co-axial propeller with four control surfaces. Note: The project is in progress, further details/sections will be added as...
Quasi Direct Drive Actuator

An open-source Quasi Direct Drive Actuator for use in locomotion centric projects. Note: The project is ongoing, the blog post will be updated as the project progresses. Hardware 400kv BLDC ...
Plug-and-Play Oxygen Auto-flow Regulator for Low Flow Oxygen Therapy
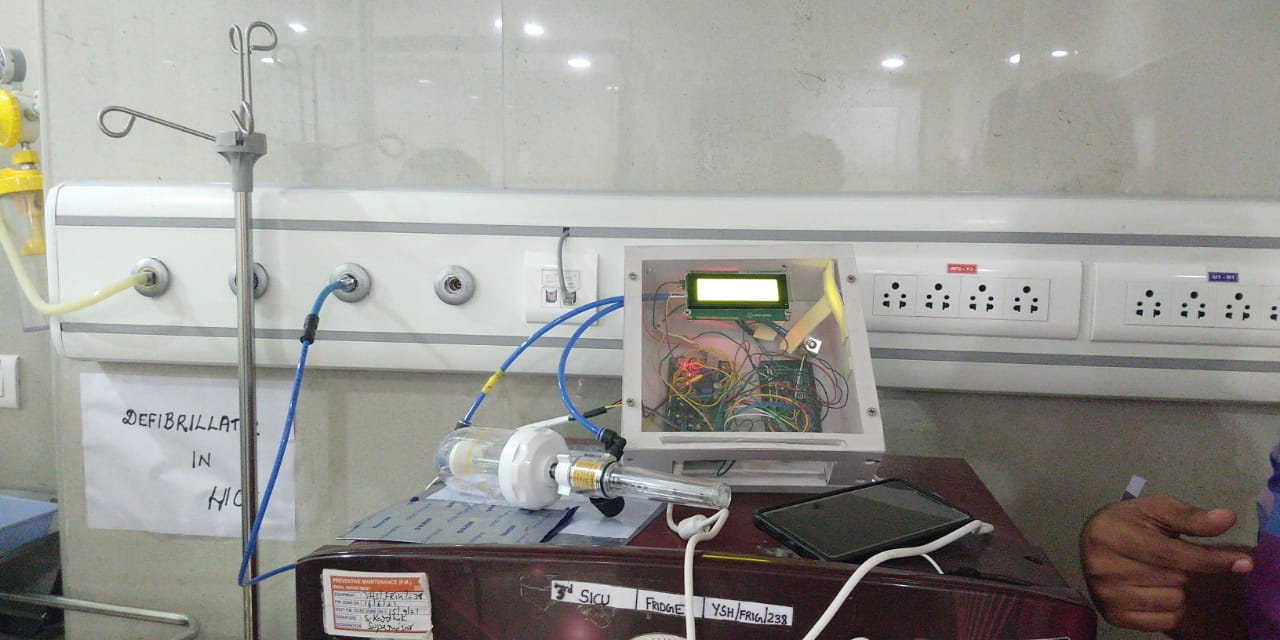
A portable, easy to interface device that intelligently controls the oxygen flow rate based on oxygen saturation and other vitals. This work has been published, please find the full details in ...
Dino Game Arduino Edition

Introduction I always had a thing for wearable electronics, a few months ago I got a cheap TFT display to play around with and the ultimate goal was to get familiar with all the electronics so that...
Manipulator Workspace Plotter
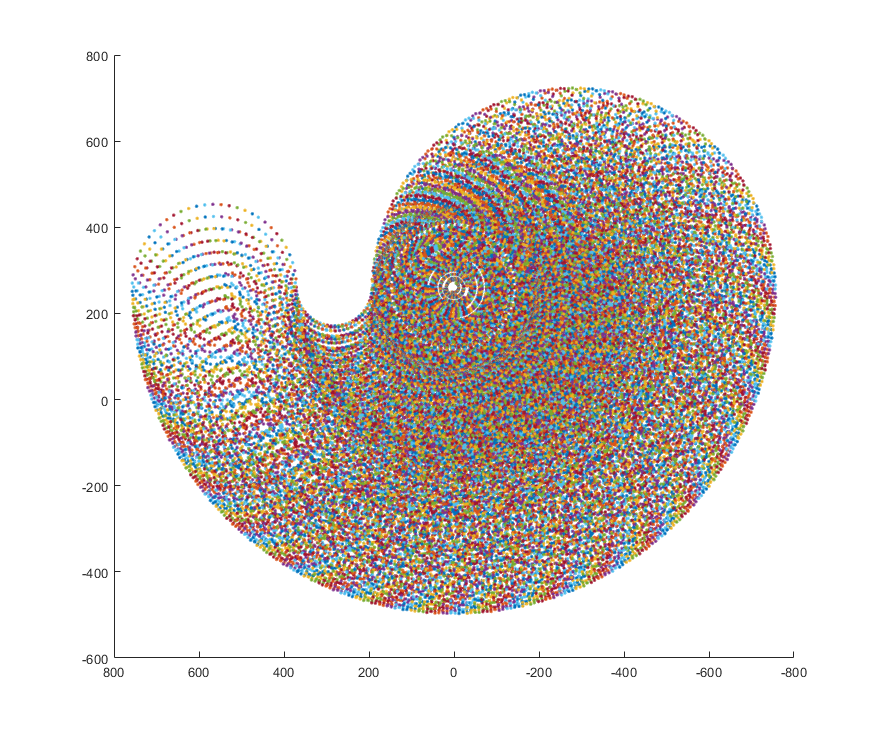
Introduction I wrote this small script to tinker with DH Parameters and wanted to visualize and understand how joint limits affect the manipulator workspace. While there are many ways of generating...
Autonomous Stair Climbing Robot
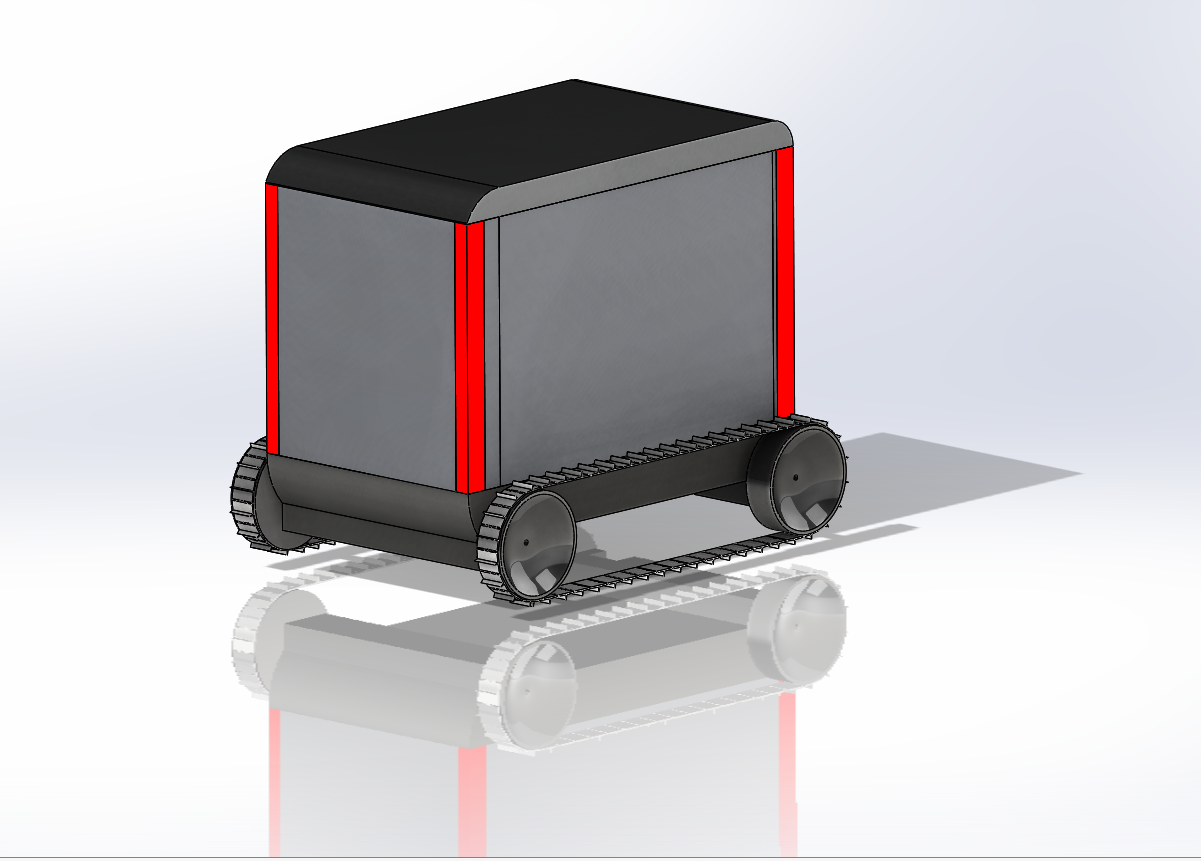
The aim of this project is to “Design, Develop and Implement an Autonomous Stair Climbing Robot which can climb stairs, turn at the quarter-landings and deliver packages autonomously”. Team ...
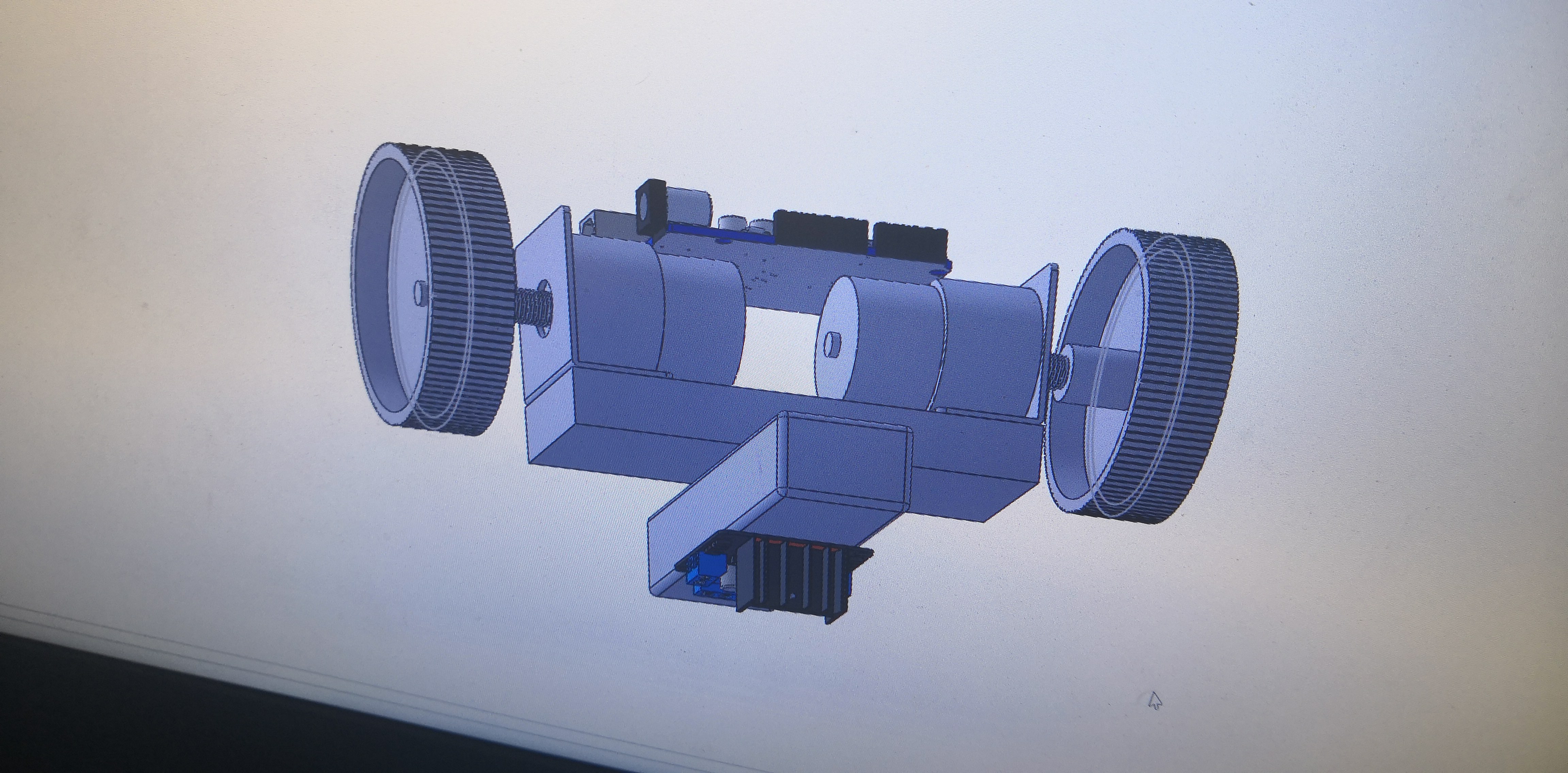
Underwater Rover

The primary objective of this project was to build an underwater rover platform that can be used to experiment with topics ranging from control systems and computer vision to embedded systems and...
Spherical Robot
A project to explore the use cases and challenges of using a spherical robot for omnidirectional traversal. Note: This is an old project and has been recently documented, most of the project med...
Gaming Wheel

A cheap and affordable gaming wheel based on the Atmega-328p, MPU6050 and capacitive touch sensors for an immersive gaming experience. Hardware Arduino Uno ADXL345 (or any IMU or tilt senso...