
Deep Reinforcement Learning - Part 4 - Monte Carlo, Temporal Difference & Bootstrapping Methods
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Deep Reinforcement Learning - Part 3 - Dynamic Programming
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Deep Reinforcement Learning - Part 0 - Getting Started
Getting into deep reinforcement learning is a tough but rewarding journey. The primary reason it is so difficult for beginners is due to the shear number of fields involved. Deep Reinforcement Lear...
Deep Reinforcement Learning - Part 2 - Finite MDP
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
Deep Reinforcement Learning - Part 1 - Multi-Arm Bandits
This post is part of the Deep Reinforcement Learning Blog Series. For a detailed introduction about the series, the curicullum, sources and references used, please check Part 0 - Getting Started. ...
URDF
The URDF file format is a way to represent robots and their components in ROS. It uses a modified verion of the XML syntax. Structure of URDF geometry types box <box size="0.6 0.1 0.2"/...
TF101
Contents: Visulization of TF, Publishing, Broadcasting & Listening to TF, Static Transform, Joint and Robot State Publishers. A transform specifies how data expressed in a frame can be trans...
ROS Basics
Packages ROS uses packages to orgnaize its program, you can think of a package as all the files that a specific ROS program needs to run sucessfully. A few common items inside a package: launc...
Hands On with AVR - 02 Interrupts
Most processors have interrupts. Interrupts let you respond to “external/internal” events while doing something else. This article uses concepts that have been covered in the previous post “AVR Di...
Robotics Theory - 2D Robotics
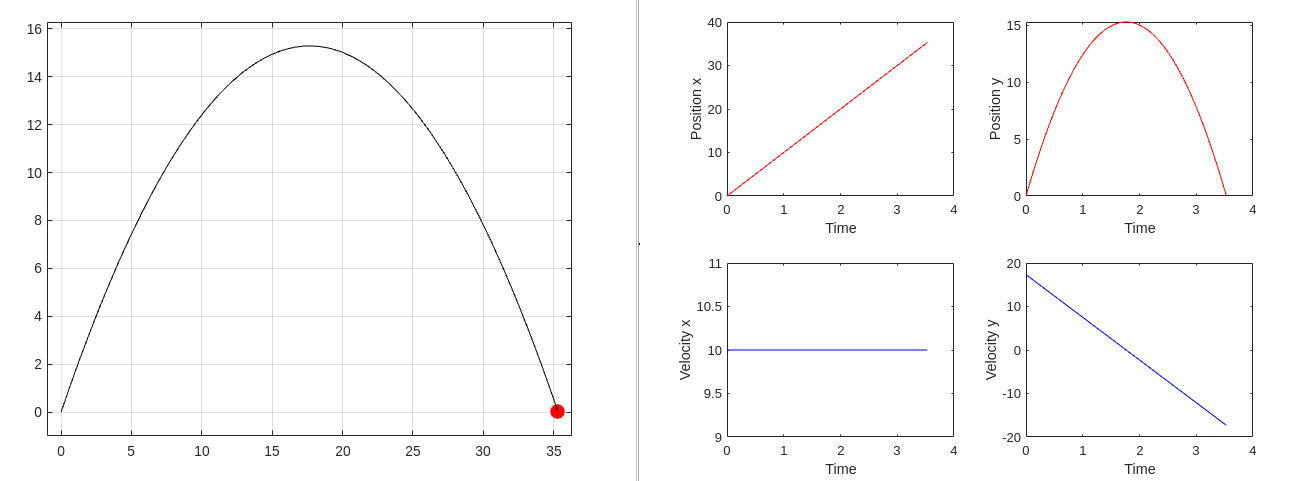
Introduction Coordinate Transformation in 2D The motion of manipulators and robots is often very complex and mathematically demanding. A single coordinate frame usually isn’t sufficient, and its o...
Hands On with AVR - 03 Timers
The ATmega328p has two 8 bit timers and one 16 bit timer. Each timer has multiple modes of working. We will be covering all the timers together in the tutorial, one mode at a time. Timers & Pr...
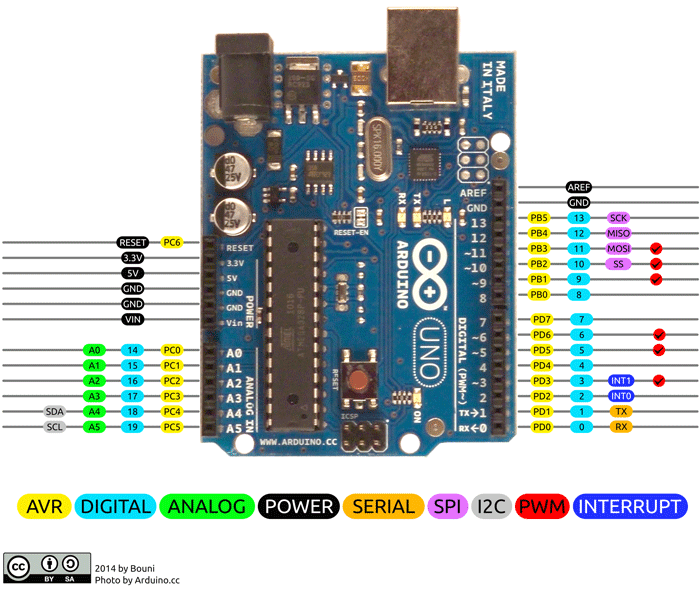
Hands On with AVR - 01 Port Manipulation
Port Manipulation refers to the technique of directly working with the underlying registers of the ATmega chip(in this context) instead of relying on predefined Arduino functions. This is primarily...